Pirms sākam ESP32 saskarni ar PIR sensoru, mums jāzina, kā darbojas pārtraukumi un kā tos nolasīt un apstrādāt ESP32. Detalizēti apspriedīsim PIR darbību ar ESP32.
Šeit ir šī raksta saturs:
2: Pārtraukuma izsaukšana ESP32 — MicroPython
3: PIR sensora saskarne ar ESP32 — MicroPython
3.1: PIR kustības sensors (HC-SR501)
1: Kas ir pārtraukumi
Lielākā daļa notikumu, kas notiek ESP32 programmēšanā, notiek secīgi, kas nozīmē koda izpildi pēc rindas. Lai apstrādātu un kontrolētu notikumus, kuriem nav jādarbojas secīgas koda izpildes laikā Pārtrauc tiek izmantoti.
Piemēram, ja mēs vēlamies izpildīt noteiktu uzdevumu, kad notiek kāds īpašs notikums vai tiek dots sprūda signāls uz mikrokontrollera digitālajām tapām, mēs izmantojam pārtraukumu.
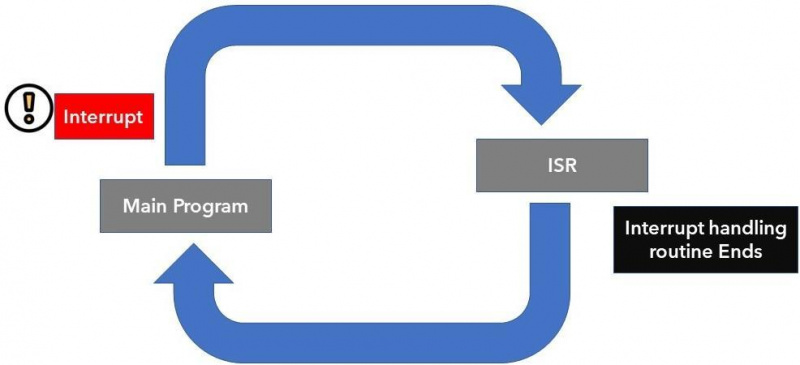
Ar pārtraukumu mums nav nepārtraukti jāpārbauda ESP32 ievades tapas digitālais stāvoklis. Kad notiek pārtraukums, procesors aptur galveno programmu un tiek izsaukta jauna funkcija, kas pazīstama kā ISR ( Pārtraukt pakalpojuma rutīnu ). Šis ISR funkcija apstrādā pārtraukumus, kas radušies pēc tam, atgriezieties galvenajā programmā un sāciet to izpildīt. Viens no ISR piemēriem ir PIR kustības sensors, kas ģenerē pārtraukumu, tiklīdz tiek konstatēta kustība.
1.1: pārtrauc tapas ESP32
Ārēju vai aparatūras pārtraukumu var izraisīt jebkurš aparatūras modulis, piemēram, pieskāriena sensors vai spiedpoga. Pieskāriena pārtraukumi notiek, kad ESP32 tapās tiek konstatēts pieskāriens, vai arī GPIO pārtraukumu var izmantot, kad tiek nospiests taustiņš vai spiedpoga.
Šajā rakstā mēs aktivizēsim pārtraukumu, kad kustība tiks noteikta, izmantojot PIR sensoru ar ESP32.
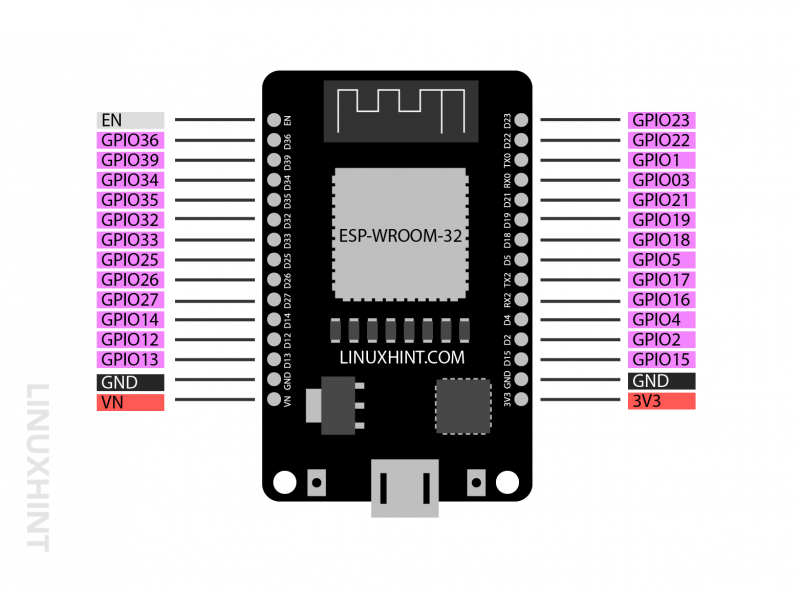
Gandrīz visas GPIO tapas, izņemot 6 SPI integrētās tapas, kuras parasti tiek piegādātas 36 ESP32 plates pin versiju nevar izmantot, lai pārtrauktu zvanu. Tātad, lai saņemtu ārējo pārtraukumu, ESP32 var izmantot šādas tapas:
2: ESP32 pārtraukuma izsaukšana, izmantojot MicroPython
Lai ieprogrammētu ESP32 plati ar PIR sensoru, izmantojot MicroPython kodu. Mums ir jādefinē pārtraukuma funkcija. Tālāk ir norādītas dažas vienkāršas darbības, kas palīdz noteikt ESP32 plates pārtraukumu.
1. darbība. Inicializējiet pārtraukumu apstrādes funkciju: Pārtraukumu apstrādes funkcija jādefinē vienkāršā veidā, lai to varētu ātri izpildīt un pēc iespējas ātrāk atgriezties galvenajā programmā. To var izdarīt, definējot globālo mainīgo, lai tam varētu piekļūt jebkur koda iekšpusē, ja tas tiek izsaukts.
Šeit PIR sensora gadījumā mēs izmantosim GPIO tapu kā a globāli mainīgs. Pārtraukšanas funkcija izmantos tapu kā argumentu un apraksta GPIO tapu, kas izraisa pārtraukuma funkcijas rašanos.
def hand_interrupt ( pin ) :2. darbība: iestatiet GPIO tapu pārtraukumam: Lai iegūtu GPIO tapas vērtību, mums ir jāizveido objekts, kas ņems no tā ievadi, izmantojot Pin.IN kā otrais arguments mūsu piespraudes klasē. Mēs to varam pārdēvēt par jebkuru citu.
pin = Piespraust ( 13 , Piespraust. IN )3. darbība. Pievienojiet pārtraukumu PIR sensora GPIO tapai, izmantojot metodi irq().
Izmantojot tālāk norādīto komandu, mēs varam iestatīt pārtraukumu uz tapu, kuru mēs definējām iepriekš.
tilts. irq ( sprūda = Piespraust. IRQ_RISING , apdarinātājs = hand_interrupt )The irq () metode tiek izmantota, lai pievienotu pārtraukumu pie tapa. irq () pieņem divus dažādus argumentus:
- Sprūda
- Apdarinātājs
sprūda: Šis arguments izskaidro sprūda veidu. Tālāk ir norādīti trīs režīmi:
- Pin.IRQ_FALLING: Kad tapa pāriet no HIGH uz LOW, tiek sākts pārtraukums.
- Pin.IRQ_RISING: Pēc tapas pārejas no LOW uz HIGH tiek sākts pārtraukums.
- Pin.IRQ_FALLING|Piespraust.IRQ_RISING: Iedarbiniet pārtraukumu ikreiz, kad tapa maina savu stāvokli. Spraude tiek iestatīta uz HIGH vai LOW.
apdarinātājs: Šī funkcija tiks izsaukta, tiklīdz tiek aktivizēts pārtraukums.
3: PIR sensora saskarne ar ESP32
Tā kā tagad mēs esam aptvēruši pārtraukumu jēdzienus ar ESP32, izmantojot MicroPython, tagad mēs savienosim PIR sensoru ar ESP32. Šeit mēs izmantosim Piespraust.IRQ_RISING režīmā MicroPython kods PIR sensoram, jo mēs vēlamies iedarbināt LED katru reizi, kad PIR sensors nosaka kustību. Šī gaismas diode paliks ieslēgta noteiktu laiku, pēc tam izslēdzas.
Būs nepieciešami šādi komponenti:
- ESP32 izstrādes plate
- PIR kustības sensors (HC-SR501)
- 220 omu rezistors
- Džemperu vadi
- Maizes dēlis
- LED
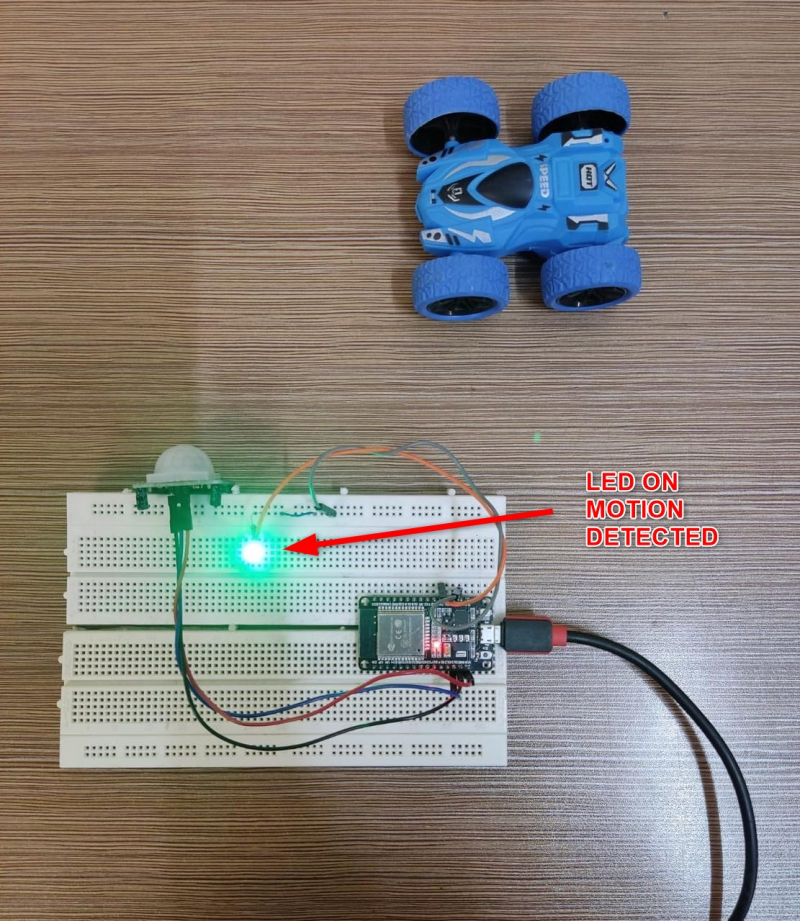
Shematisks PIR sensoram ar ESP32:
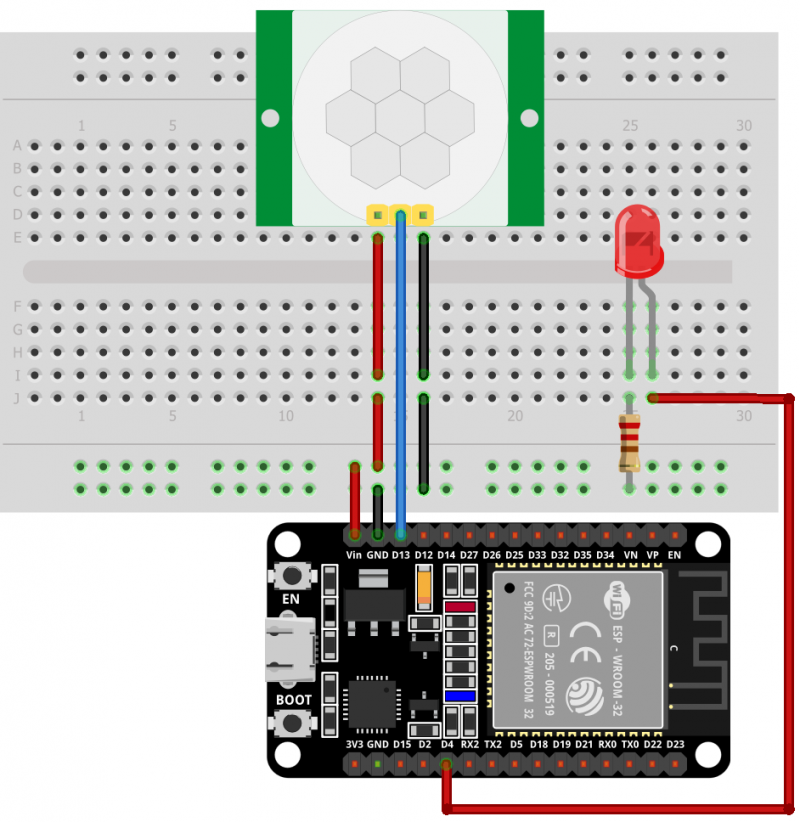
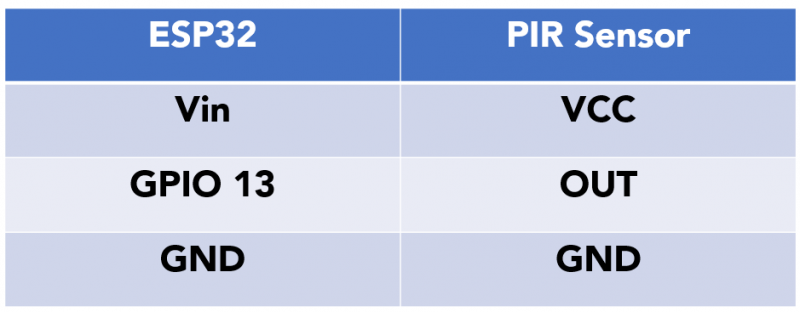
ESP32 tapas konfigurācija ar PIR sensoru ir:
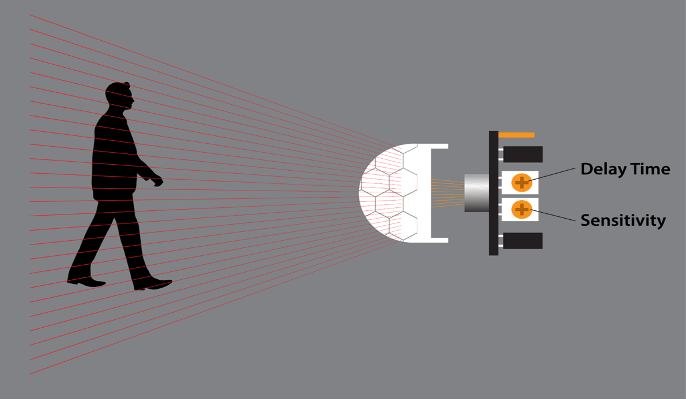
3.1: PIR kustības sensors (HC-SR501)
PIR ir akronīms vārdam Pasīvie infrasarkanie sensori . Divi kopā izmantoti piroelektriskie sensori, kas noteiks apkārtējā siltuma daudzumu. Abi šie piroelektriskie sensori atrodas viens pēc otra, un, kad objekts nonāk to diapazonā, siltumenerģijas izmaiņas vai signāla atšķirība starp abiem šiem sensoriem izraisa PIR sensora izvadi LOW. Kad PIR izejas tapa kļūst LOW, mēs varam iestatīt konkrētu izpildes instrukciju (LED mirgo).
Tālāk ir norādītas PIR sensora īpašības:
- Jutību var iestatīt atkarībā no projekta atrašanās vietas (piemēram, peles vai lapu kustības uztveršana)
- PIR sensoru var iestatīt, cik ilgi tas uztver objektu
- Plaši izmanto mājas drošības signalizācijās un citās siltuma noteikšanas lietojumprogrammās.
3.2: spraudnis HC-SR501
PIR HC-SR501 ir aprīkots ar trim tapām. Divas no tām ir barošanas tapas Vcc un GND, un viena ir sprūda signāla izejas tapa.
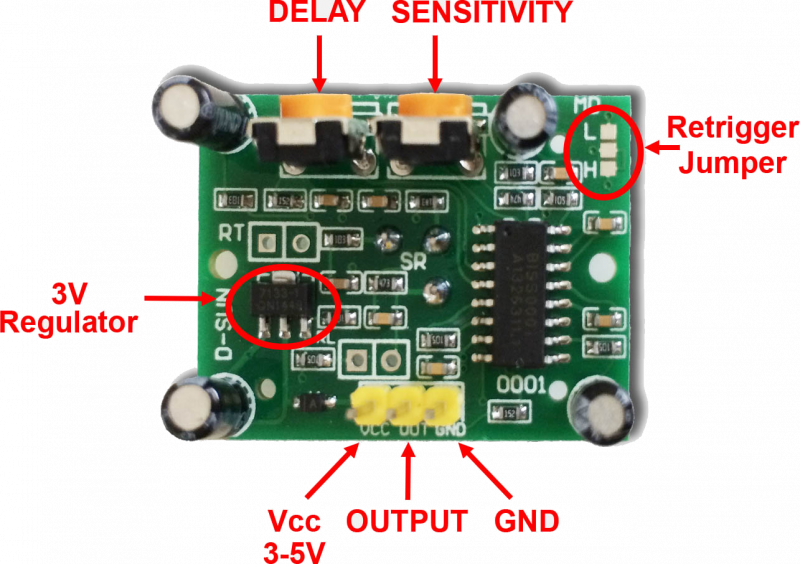
Tālāk ir sniegts PIR sensora tapu apraksts:
| Piespraust | Vārds | Apraksts |
| 1 | Vcc | Sensora ievades tapa Pievienojiet ESP32 Vin Pin |
| divi | ĀRĀ | Sensora izvade |
| 3 | GND | Sensors GND |
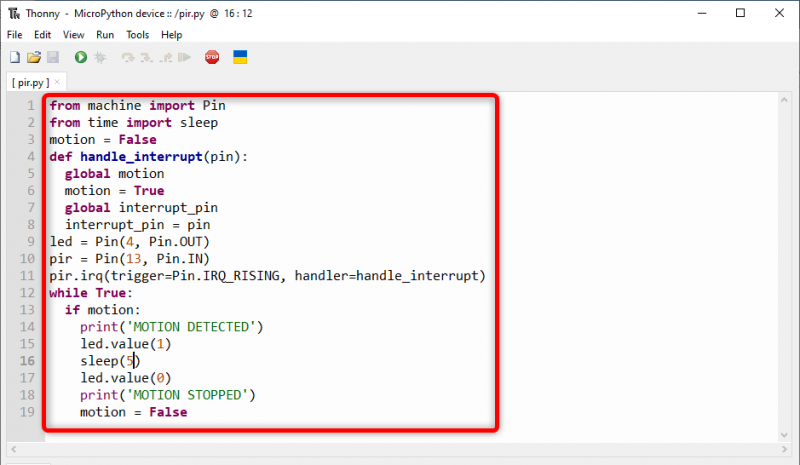
Tagad, lai ieprogrammētu ESP32, ierakstiet norādīto kodu Thonny IDE redaktorā vai jebkurā citā MicroPython IDE un augšupielādējiet to ESP32.
no mašīnas importēšanas Pinno laiks importēt miegu
kustība = Nepatiesi
def hand_interrupt ( pin ) :
globālā kustība
kustība = Taisnība
globālais interrupt_pin
interrupt_pin = pin
vadīja = Piespraust ( 4 , Piespraust. ĀRĀ )
tilts = Piespraust ( 13 , Piespraust. IN )
tilts. irq ( sprūda = Piespraust. IRQ_RISING , apdarinātājs = hand_interrupt )
kamēr Taisnība :
ja kustība :
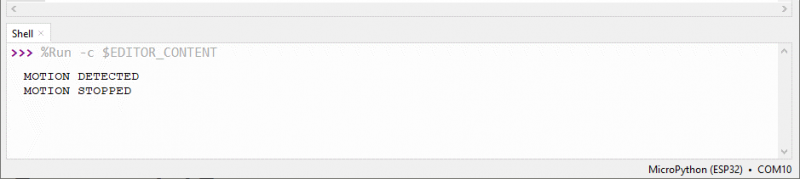
drukāt ( 'KUSTĪBA KONSTATĒTA' )
vadīja. vērtību ( 1 )
Gulēt ( 5 )
vadīja. vērtību ( 0 )
drukāt ( 'KUSTĪBA APTURĒTA' )
kustība = Nepatiesi
Pirmkārt, mēs importējām pin klase no mašīnas moduļa un Gulēt kavēšanās pievienošanas metode. Tālāk tiek izveidots mainīgais ar nosaukumu kustība. Šis mainīgais noteiks, vai kustība ir noteikta vai nē.
Tad mēs izveidojām funkciju hand_interrupt. Ikreiz, kad PIR sensors nosaka kustību, šī funkcija tiks aktivizēta. Tas izmanto tapu kā ievades parametru un norāda tapu, kas izraisa pārtraukumu.
Vienkāršiem vārdiem sakot, katru reizi, kad PIR nosaka kustību, hand_interrupt iestatīs kustības mainīgo uz True un saglabās tapu, kas izraisa pārtraukumu. Viena lieta, kas jāatceras vienmēr deklarē kustība mainīgais kā globāls, jo tas ir nepieciešams visā kodā.
Virzoties uz priekšu, mēs izveidojām divus tapas objektus, no kuriem viens glabā LED tapas, bet otrs izmantos PIR sensora izvadi pie GPIO 13. tapas. Tālāk mēs paziņojām par sprūda tapu. AUGŠĀS režīmā.
Iekš cilpa koda daļu, tas pārbaudīs kustības mainīgā vērtību, tiklīdz tā kļūs patiesa. LED ieslēgsies savienots ar ESP32 4. kontaktu. Ja kustība ir apturēta, gaismas diode izslēgsies pēc 5 sekundēm.
3.4: izvade
Izvades sadaļā mēs redzam, ka objekts atrodas ārpus PIR sensora diapazona, tāpēc LED ir pagriezts IZSLĒGTS .
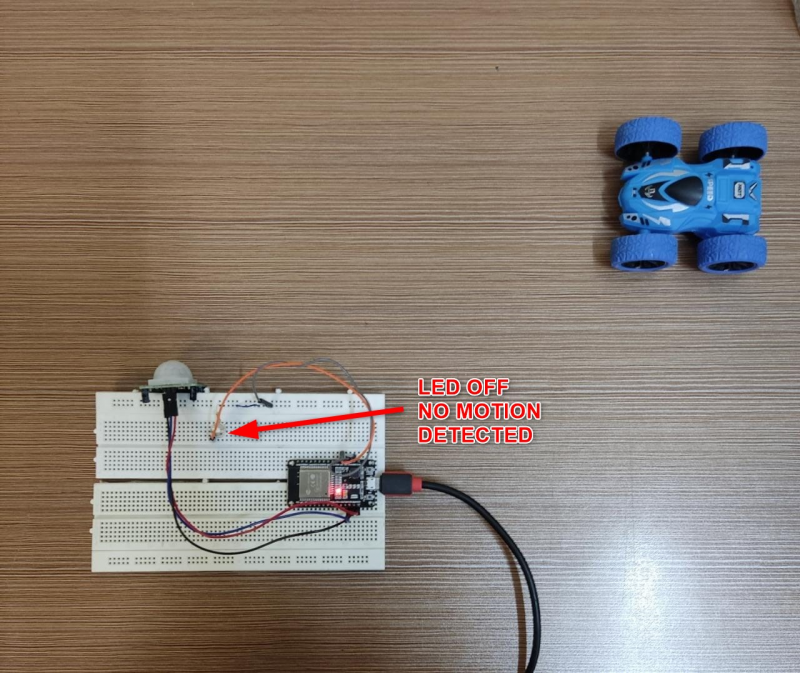
Tagad PIR sensora gaismas diode noteiks kustību IESL priekš 5 sek pēc tam, ja kustība netiek konstatēta, tā paliks IZSLĒGTS līdz tiek saņemts nākamais trigeris.
Sekojošo izvadi parāda apvalks/terminālis programmā Thonny IDE.
Secinājums
PIR sensors ar ESP32 var palīdzēt noteikt dažādu lietu kustību. Izmantojot pārtraukšanas funkciju programmā MicroPython ar ESP32, mēs varam izraisīt atbildi uz noteiktu GPIO tapu. Kad tiek konstatētas izmaiņas, tiks aktivizēta pārtraukšanas funkcija un ieslēgsies gaismas diode.